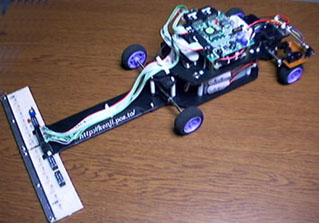
 丂僕儍僷儞儅僀僐儞僇乕儔儕乕'99偵弌傞偨傔偵嶌偭偨儅僔儞偱偡丅
丂僕儍僷儞儅僀僐儞僇乕儔儕乕'99偵弌傞偨傔偵嶌偭偨儅僔儞偱偡丅 丂搶幣偺斀幩宆僼僅僩僙儞僒TLP908偑14屄暲傫偱偄傑偡丅
丂搶幣偺斀幩宆僼僅僩僙儞僒TLP908偑14屄暲傫偱偄傑偡丅丂14偲偄偆悢帤偵怺偄堄枴偼偁傝傑偣傫丅
丂庴岝晹偺揹埑傪僐儞僷儗乕僞偱斾妑偟偰ON/OFF傪敾掕偟偰偄傑偡丅
丂4屄擖傝OP傾儞僾偑3屄偟偐側偐偭偨偺偱14屄偺偆偪12屄偟偐巊傢傟偰偄傑偣傫丅
丂棤柺偼僙儞僒(崅偝2.5mm)偲楬柺偺嫍棧傪堦掕偵偡傞偨傔偵3mm偺僾儔僗僠僢僋偺妏嵽傪揬傝晅偗偰偄傑偡丅
丂TAMIYA偺僴僀僗僺乕僪僊傾儃僢僋僗HE偵RE-280儌乕僞乕傪柍棟栴棟偮偗偰偄傑偡丅
丂僷儚乕MOS-FET偱PWM嬱摦偟偰偄傑偡丅
丂儈僯巐嬱偺儚儞僂僃僀儂僀乕儖偺嬻夞傝傪彮偟偒偮偔偟偰巊偭偰偄傑偡丅
丂4mm偺僔儍僼僩傪儈僯巐嬱偺僞僀儎偵崌偆傛偆偵榋妏宍偵嶍傞偺偑戝曄偱偟偨丅
丂撪椫嵎傪側偔偡偨傔偵慜屻椫傪僒乕儃(嫗彜 HS-525BB)偱摦偐偟偰偄傑偡丅
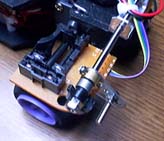 丂僗僺乕僪傪弌偟偡偓側偄傛偆偵儅僂僗偐傜偼偢偟偨儘乕僞儕僄儞僐乕僟偱僗僺乕僪傪惂屼偟偰偄傑偡丅
丂僗僺乕僪傪弌偟偡偓側偄傛偆偵儅僂僗偐傜偼偢偟偨儘乕僞儕僄儞僐乕僟偱僗僺乕僪傪惂屼偟偰偄傑偡丅丂
丂揹尮偼扨嶰傾儖僇儕揹抮8杮傑偱側偺偱4杮傪儌乕僞乕梡丄4杮傪CPU偲僒乕儃梡偵偟傑偟偨丅
丂CPU偺揹尮偼掅僪儘僢僾嶰抂巕儗僊儏儗乕僞乕(LM2940CT-5.0)偱埨掕壔偟偰偄傑偡丅
丂戝夛偐傜巟媼偝傟偨H8/3048F偲偄偆CPU偱偡丅
丂僔儕傾儖億乕僩偵愙懕偟偰撪憼偺Flash-ROM偵僾儘僌儔儉傪彂偒崬傒偱偒傑偡丅
丂奐敪娐嫬偑MS-DOS側偺偑偮傜偄偱偡丅
丂庡偵儊僀儞偺儖乕僾偲10ms枅偺僞僀儅妱傝崬傒偱屇傃弌偝傟傞僗儗僢僪偑偁傝傑偡丅
- 儊僀儞儖乕僠儞
丂僙儞僒乕撉傒庢傝仺僋儘僗儔僀儞専弌仺僙儞僞乕儔僀儞専弌仺僒乕儃惂屼仺僇乕僽偺尭懍張棟
- 10ms枅
丂儘乕僞儕僄儞僐乕僟撉傒崬傒側偳
- 10ms偺儖乕僠儞偑10夞僐乕儖偝傟偨偲偒(100ms枅)
丂愝掕懍搙偲尰嵼偺懍搙傪斾妑偟偰儌乕僞乕偺PWM抣傪寛掕